

-
 Skopiowano
Skopiowano

Co:
Modułowy
pojazd naziemny
Kiedy:
październik 2018 –
marzec 2019

Koordynator projektu:
Piotr
Misiorek


Używany sprzęt Skriware:
drukarka
3D Skriware 2
Grupa miłośników kodu i płytek drukowanych z ZSP1 w Zamościu opracowała już m.in. robotyczne ramię i czterowirnikowego drona. By łatwiej przygotowywać kolejne urządzenia, koło zainteresowań potrzebowało drukarki 3D. Skriware 2 pozwoliło uczniuom stworzyć od podstaw zdalnie sterowane autko z kamerą i możliwością instalacji dodatkowych sensorów.
Zajęcia pozalekcyjne z robotami
Nie chodziło jednak o samą budowę zwrotnego łazika. Celem szkolnego koła zainteresowań “Robonomik” było także nauczenie się obsługi oprogramowania do modelowania 3D (tu: Autodesk Inventor) oraz drukarki 3D (tu: Skriware 2). – Zajęcia pozwalały również na rozwijanie kreatywności. Uczniowie samodzielnie rozwiązywali zadanie projektowe, dzieląc się obowiązkami i współpracując w celu realizacji zadania zgodnie z harmonogramem – opowiada o kilkumiesięcznym projekcie opiekun Piotr Misiorek:
Drukarka 3D była niezbędnym narzędziem, ponieważ posłużyła do produkcji niemal wszystkich elementów nieelektronicznych: ramy pojazdu, nadwozia, a także części mechanizmów napędu i skrętu łazika, włącznie z kołami i zębatkami połączonymi z użytym w projekcie silnikiem. Z uwagi na rozmiary łazika jego rama była drukowana w kilku częściach. Moduły te zostały wydrukowane z materiału PLA z wypełnieniem 20%, nie licząc mechanizmu napędowego, bo tutaj wypełnienie zostało zwiększone do 50%.
Robotyka dla dzieci i młodzieży

Zanim młodzi zamościanie przystąpili do eksperymentów z optymalnymi ustawieniami druku oraz produkowania prototypów, musieli opracować cyfrowe modele poszczególnych części. Ten etap projektu obejmował zajęcia pozalekcyjne i trwał od października 2018 do lutego 2019 i wymagał opanowania Autodesk Inventora. W jego toku powstały kolejno pierwszy układ sterowania i pierwszy układ napędowy, prototypy kół i wreszcie, na dzień przed walentynkami, członkowie koła zainteresowa mieli model 3D podwozia gotowy do druku.
Wytwarzanie kompletu części ukończono tydzień później. Był to dla “Robonomika” pierwszy taki eksperyment. Testy urządzenia, jeszcze pozbawionego nadwozia, pozwoliły dostrzec niedoskonałości wczesnej wersji. Przeprojektowana wymagały modele kół i układu napędowego, całkowicie zmienił się także system sterowania. Wgląd w inżynierskie podejście uczniów ZSP1 daje fragment raportu:
Układ skręcania początkowo był zrealizowany za pomocą jednego serwomechanizmu umieszczonego po środku przedniej części podwozia. Obracał on kołami za pomocą cienkiego pręta stalowego, lecz to rozwiązanie było bardzo niestabilne i nielinowe. W obecnym modelu skręt jest realizowany przez dwa serwomechanizmy, do których przednie koła są przymocowane bezpośrednio przez adapter orczyk serwa – oś 5 mm. Aparatura skonfigurowana została tak, aby przesyłała ten sam sygnał do dwóch serwomechanizmów. Dzięki takiemu rozwiązaniu nie ma problemu z synchronizacją skrętu kół przednich.
Łazikiem na zajęcia pozalekcyjne
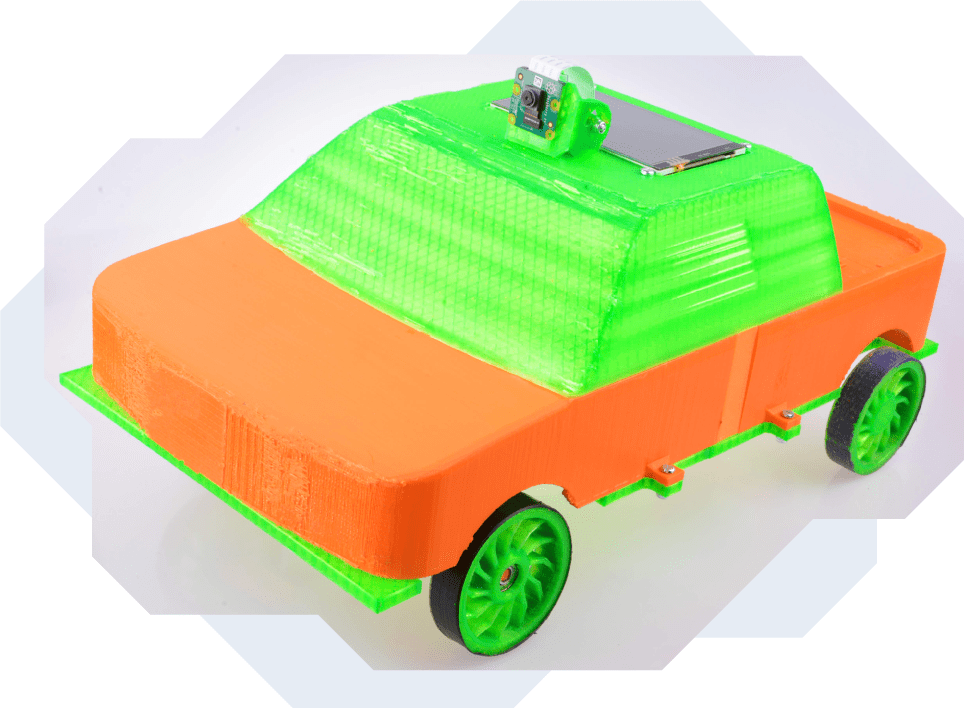
W połowie marca łazik doczekał się wydrukowanego w 3D pełnego podwozia, na którym zamontowane zostały komponenty elektroniczne. Już na finiszu prac zostało zaprojektowane i wydrukowane w 3D charakterystyczne, dwukolorowe nadwozie.
Koło zainteresowań “Robonomik” potraktowało swoją pracę w bardzo kreatywny sposób. Chociaż uczestnicy opracowywali auto, użyli doświadczenia nabytego w pracy z dronami. Za ruch łazika odpowiada zresztą silnik wykorzystywany w budowie dronów. – Pozwala to na łatwą konfigurację zestawu, lecz jak każdy silnik bezszczotkowy wymaga elektronicznego kontrolera prędkości – wyjaśniają autorzy na swojej stronie WWW. Kontrolerem sterują drogą radiową, jako nadajnika i odbiornika używając aparatury modelarskiej FlySky – dzięki temu na otwartym terenie łazikiem można sterować nawet z odległości kilometra.

Dzieło “Robonomika” to więcej niż tylko sterowany radiowo samochodzik. W przygotowanym przez ZSP1 modelu zamontowana została kamera przekazująca obraz przez sieć Wi-Fi, wykorzystany został także ekran dotykowy. Oba moduły działają pod kontrolą pokładowego komputerka Raspberry Pi 3 B+, do którego można podłączyć także np. czujniki temperatury i wilgotności. Otwarta konstrukcja od początku była jednym z założeń twórców, dlatego w projekcie ramy uwzględnili zaczepy pozwalające na rozbudowę funkcji pojazdu.
